Robotics Simulation Software
The robot simulation software, Robologix (based on the FANUC LR Mate series robots), provides access to a range of industrial robots including Cartesian and SCARA designs and includes various end effectors. Students gain practical, "hands on" programming of an industrial robot through a combination of teach-pendant programming, and 3D simulated environments. These environments include pick and place, spray painting and spot and arc welding.
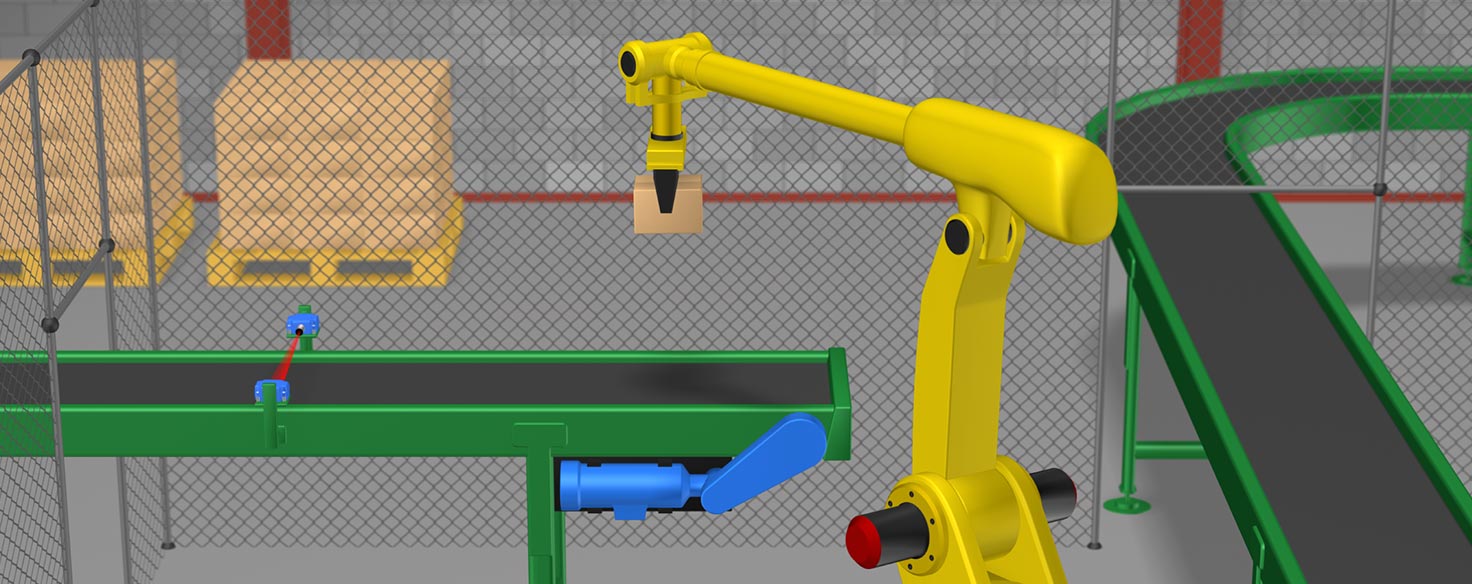
Learn to Program Industrial Robots in a Safe, Virtual Environment
The RoboLogix programming environment provides a very realistic simulation of control systems using robotic equipment. The ability to preview the behavior of a robotic system in a "virtual" world allows for a variety of mechanisms, devices, configurations and controllers to be tried and tested by students before being exposed to "real world" systems. RoboLogix receives control signals, determines if contact or collision between objects in the system has occurred, and returns simulated sensor information as feedback. This system has the capacity of real-time simulation of the motion of an industrial robot through 3D animation. The principles of 3D motion simulation and both geometry modeling and kinematics modeling are presented in the RoboLogix virtual environment.
